|
На данной странице представлена ознакомительная часть выбранного Вами патента
Для получения более подробной информации о патенте (полное описание, формула изобретения и т.д.) Вам необходимо сделать заказ. Нажмите на «Корзину»
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ |  |
Номер публикации патента: 2176592 |  |
| Редакция МПК: | 7 | | Основные коды МПК: | B25J018/04 | | Аналоги изобретения: | КРАЙНЕВ А.Ф. Словарь-справочник по механизмам. - М.: Машиностроение, 1987, с.9-10. SU 1110623 А, 30.08.1984. SU 1293022 А2, 28.02.1987. US 5885052 А, 23.03.1999. FR 2716400 А1, 25.08.1995. |
| Имя заявителя: | Калининградский государственный технический университет | | Изобретатели: | Горлатов А.С. | | Патентообладатели: | Калининградский государственный технический университет |
Реферат | |
Изобретение относится к многозвенным комбинированным механизмам со сложным движением выходных звеньев, которые применяются при обслуживании машин, станков, прессов, устройств различного целевого назначения. Устройство содержит подвижное основание, исполнительный механизм с губками для захвата изделий, механизм поворота подвижного основания и привод. Исполнительный механизм выполнен в виде пятизвенного механизма с выходными звеньями, на которых закреплены губки для захвата изделий. Пятизвенный механизм содержит кривошипно-ползунный механизм, включающий шарнирно связанные кривошип, шатун и ползун. Механизм поворота подвижного основания выполнен в виде шарнирного четырехзвенника, выходное звено которого жестко соединено с подвижным основанием. При этом ведущие звенья механизма поворота основания и исполнительного механизма кинематически связаны между собой. Кинематическая связь выполнена в виде шкивов и гибкого элемента. Изобретение отличается простотой привода и позволит повысить производительность. 12 з.п. ф-лы, 4 ил.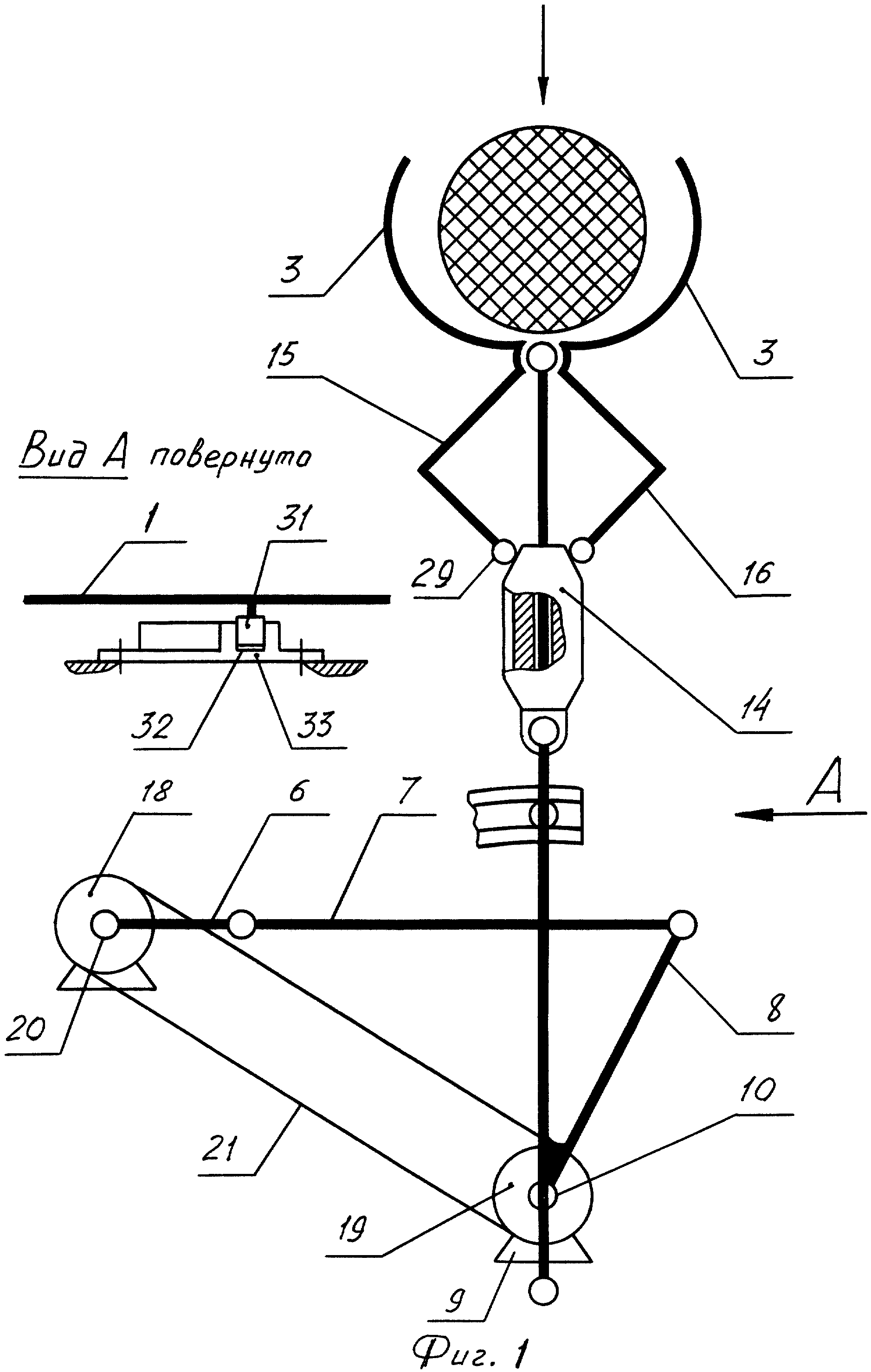
|
 Получить полное описание патента
Получить полное описание патента