|
На данной странице представлена ознакомительная часть выбранного Вами патента
Для получения более подробной информации о патенте (полное описание, формула изобретения и т.д.) Вам необходимо сделать заказ. Нажмите на «Корзину»
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ |  |
Номер публикации патента: 2164654 |  |
| Редакция МПК: | 7 | | Основные коды МПК: | F41G007/22 | | Аналоги изобретения: | МЕРКУЛОВ В.И., ЛЕПИН В.Н. Авиационные системы радиоуправления, ч.1. - М.: Радио и связь, 1997, с. 182. RU 2111439 C1, 20.05.1998. RU 2106597 C1, 10.03.1998. GB 2261133 A, 05.05.1993. US 4542870 A, 24.09.1985. US 4898341 A, 06.02.1990. FR 2694626 A1, 11.02.1994. DE 3643975 A1, 30.06.1988. |
| Имя заявителя: | ОАО "Фазотрон - Научно-исследовательский институт радиостроения" | | Изобретатели: | Курилкин В.В.
Меркулов В.И.
Шуклин А.И. | | Патентообладатели: | ОАО "Фазотрон - Научно-исследовательский институт радиостроения" |
Реферат | |
Способ предназначен для самонаведения летательных аппаратов (ЛА) с бортовыми радиолокационными станциями (БРЛС), использующими синтезирование апертуры (СА) антенны или доплеровское обужение луча (ДОЛ) диаграммы направленности антенны на наземные объекты. Способ заключается в измерении значений дальности от наводимого ЛА до наземного объекта, скорости сближения наводимого ЛА и наземного объекта, бортового пеленга наземного объекта и угловой скорости линии визирования в горизонтальной плоскости, а также поперечного ускорения наводимого ЛА в горизонтальной плоскости, формировании сигнала управления в горизонтальной плоскости в виде суммы взвешенной на переменный коэффициент усиления разности требуемого угла упреждения и бортового пеленга наземного объекта и взвешенной на переменный коэффициент усиления угловой скорости линии визирования и значения ускорения наводимого ЛА. Значения переменных коэффициентов вычисляются с учетом текущих значений дальности от наводимого ЛА до наземного объекта и их скорости сближения, а также коэффициентов, определяющих точность наведения по бортовому пеленгу наземного объекта и угловой скорости линии визирования, а также определяющих экономичность процесса наведения, а значения требуемого угла упреждения формируются специальным образом так, чтобы учесть условия применения и обеспечить стабилизацию требуемого линейного разрешения в горизонтальной плоскости. Использование предлагаемого способа наведения позволяет обеспечить одновременно высокую точность и экономичность наведения, а также стабилизировать требуемое линейное разрешение в горизонтальной плоскости при наведении ЛА на наземные объекты с помощью БРЛС при использовании СА или ДОЛ. 15 ил.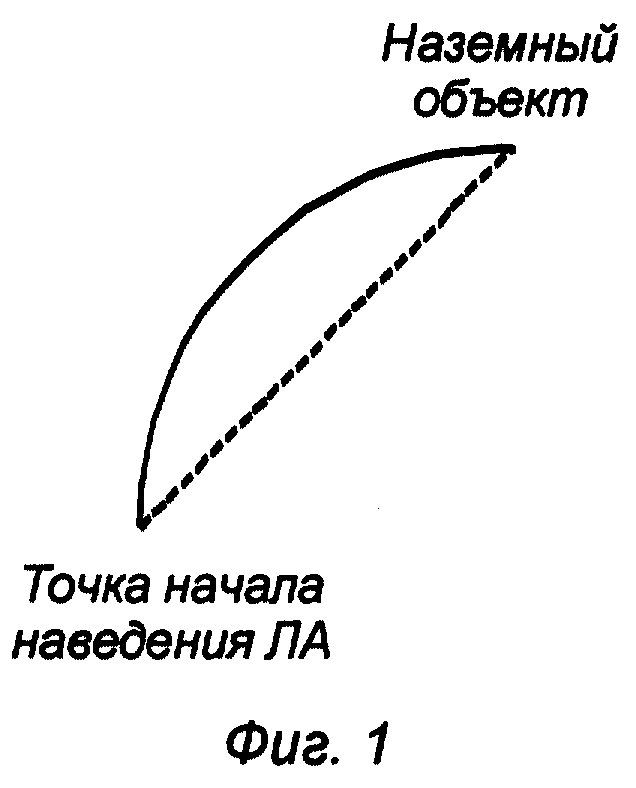
|
 Получить полное описание патента
Получить полное описание патента